树莓派ROS与C++资源介绍及实例应用
本文介绍了ROS(机器人操作系统)在树莓派平台上的资源与应用,文章首先概述了ROS的基本概念及其在树莓派上的优势,接着详细阐述了树莓派在ROS开发中的资源,包括教程、工具和库等,通过具体实例展示了如何在树莓派上使用ROS进行机器人开发,本文旨在为开发者提供ROS在树莓派上的入门指导和实际操作经验。
?1. 树莓派简介

树莓派实验室:https://shumeipai.nxez.com/download#os
趣无尽(DIY社区):https://www.quwj.com/tag/raspberry-pi
树莓派(Raspberry Pi)是一款尺寸仅有信用卡大小的微型电脑,能够连接到电视、显示器、键盘和鼠标等设备进行使用。树莓派不仅可以替代日常桌面电脑执行多种任务,如文字处理、电子表格、媒体中心甚至游戏,还能播放高达4K的高清视频。
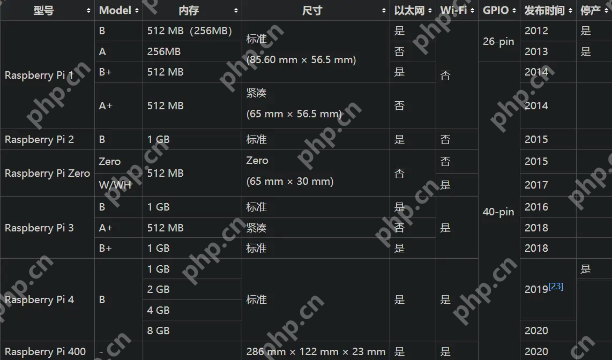
树莓派起源于教育,旨在通过低成本硬件和开源软件推动学校的基础计算机科学教育。每一代树莓派系列计算机都使用博通(Broadcom)生产的ARM架构处理器。当前生产的型号(树莓派4B)内存介于2GB到8GB之间,主要使用TF卡作为系统存储介质(首代使用SD卡),配备USB接口和HDMI视频输出(支持音频输出),内置Ethernet/WLAN/Bluetooth网络连接方式(具体取决于型号),并且支持多种操作系统。产品线型号包括A型、B型、Zero型和ComputeModule计算卡。
立即学习“C++免费学习笔记(深入)”;
Raspberry Pi OS是官方推出的适用于所有型号的树莓派操作系统,树莓派基金会网站还提供了Ubuntu MATE、Ubuntu Core、Ubuntu Server、OSMC等第三方系统供用户下载。
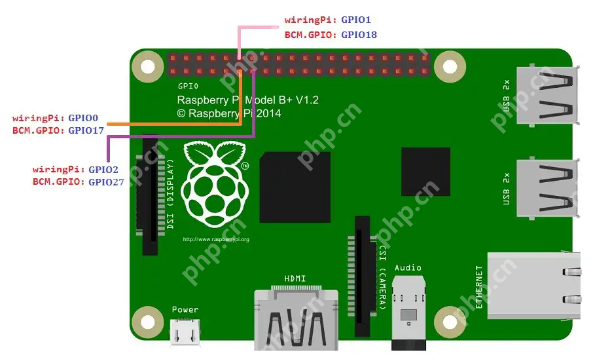 在这里插入图片描述管脚图:
在这里插入图片描述管脚图:
 在这里插入图片描述系列型号:
在这里插入图片描述系列型号:
 在这里插入图片描述
在这里插入图片描述
?2. 环境安装与配置
 在这里插入图片描述
在这里插入图片描述
使用读卡器将TF(MicroSD)卡插入电脑,进行镜像烧录:
 在这里插入图片描述
在这里插入图片描述
此外,你也可以为树莓派安装适合其他应用的操作系统,具体请参考:https://zhuanlan.zhihu.com/p/141068779
学习者需提前复习Linux相关操作命令。
还需了解网络、客户端、服务端等概念,熟练操作ssh命令、Putty工具和VNC远程桌面,学习硬件编程,树莓派单板配有40pin的GPIO接口,是学习硬件的理想工具。
?3. 应用示例
相机与计算机视觉
摄像头模块:IMX219-树莓派专用Camera接口
最简单的opencv环境配置:sudo apt-get install python-opencv
测试opencv环境:
代码语言:javascript代码运行次数:0运行复制```javascript import cv2print cv2.version
图像显示:代码语言:javascript代码运行次数:0运行复制
javascript import cv2 #导入 opencv#This reads and stores image in color into variable imgimg = cv2.imread('/home/pi/book/test_set/lena_color_512.tif',cv2.IMREAD_COLOR)#img = cv2.imread('/home/pi/book/test_set/lena_color_512.tif',1)#1表示COLOR的默认值#下面代码用来显示图像:cv2.imshow('Lena',img)cv2.waitKey(0)#延迟函数,需要一个键盘的操作cv2.destroyWindow('Lena')#关闭窗口
键盘响应:
代码语言:javascript代码运行次数:0运行复制javascript import cv2img = cv2.imread('/home/pi/book/test_set/lena_color_512.tif',1)cv2.imshow('Lena',img)keyPress = cv2.waitKey(0)if keyPress == ord('q'):cv2.destroyWindow('Lena')elif keyPress == ord('s'): cv2.imwrite('/home/pi/book/output/chapter2_prog2_output.jpg',img)cv2.destroyWindow('Lena')
激光雷达与点云处理
思岚A1、A2 ROS查看点云图像 SLAM(gmapping、hector、cartography)
扩展板与Arduino通信(串口)
Sense HAT OLED迷你屏 瑞士军刀扩展板 HiFi DAC扩展板
网友留言(0 条)